楼宇无人机管控
产品简介
安则无人机无线电监测压制一体机An-Wscan-Bm 是针对保密要害部门部位开发的无人机侦测防御产品。产品可以实现在固定区域场所的工程化部署,可联网部署,实现自动探测、自动压制一体化的 24 小时无人值守功能。
产品图片

产品特征
采用微功率干扰设计,电磁辐射满足无委型号核准要求
支持多频段监测及干扰,覆盖国内主流无人机频段
设备支持 24 小时无人值守操作,简化人员操作行为
产品可以通过网络控制,实现一键开关机管控功能
产品参数
| 序号 | 参数名称 | 技术指标 |
| 1 | 探测类型 | 全向探测 |
| 2 | 检测信号 | 无人机信号、遥控器信号和控制器链路信号 |
| 3 | 探测频率 | 2.4G、5.8G |
| 4 | 探测距离 | ≥500m |
| 5 | 最低探测高度 | 5m |
| 6 | 误报率 | ≤ 5% |
| 7 | 用户感知 | 指示灯、振动、声音 |
| 8 | 管制范围 | 900MHz、1.5GHz、2.4GHz、5.8GHz |
| 9 | 有效干扰距离 | 300 米 |
| 10 | 发射功率 | 1 瓦 |
| 11 | 连续工作时间 | ≥7*24 小时 |
| 12 | 工作温度 | -20℃~50 ℃ |
| 13 | IP 等级 | 设计为 IP65 |
产品部署
1、产品安装
设备部署于要害部位的窗户中心位置,采用平面定向天线设计确保天线朝室外发射。设备采用自适应方式,侦测到疑似无人机信号后再启用干扰信号,干扰信号的有效作用时间不超过 60 秒。
如下图所示,在平面图中的重要要害部位部位安装部署自动侦测干扰的无人机防御设备,可有效防止无人机抵近侦察,拍照,窃密等。
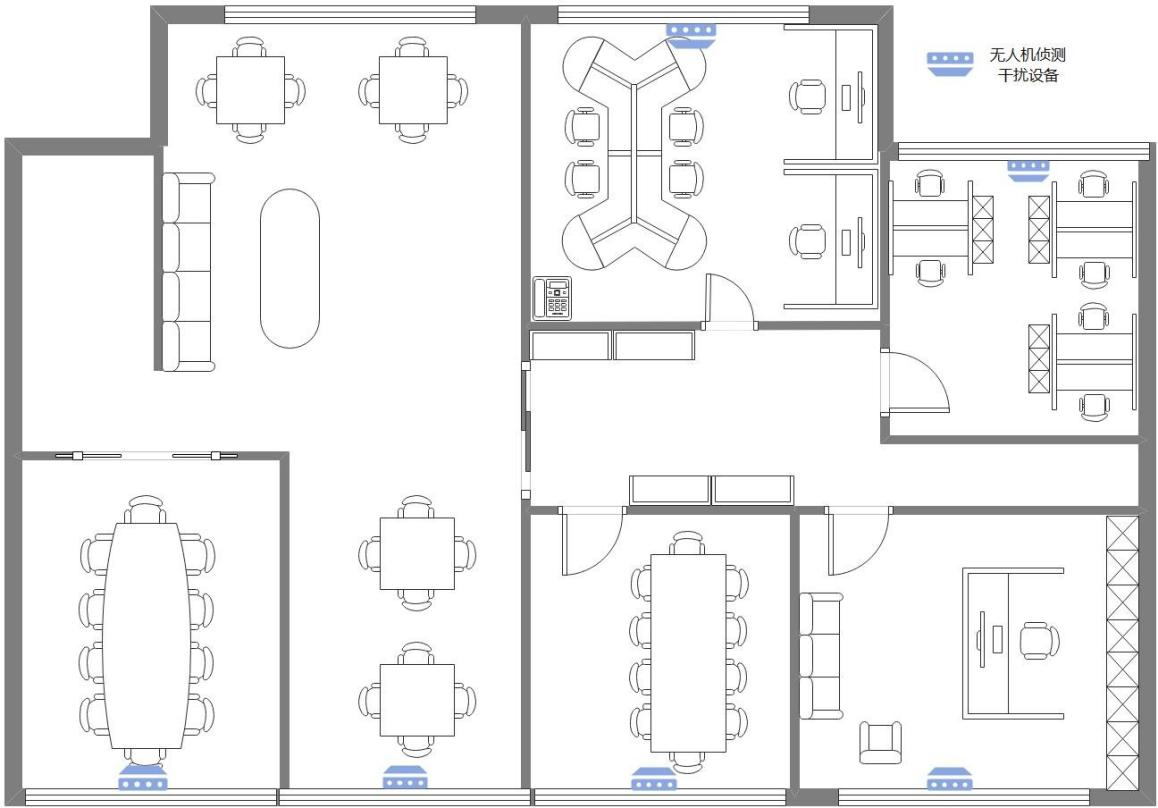
设备可直接放置于窗户玻璃正下方窗台上,也可以通过三脚架支撑固定。仅需要市电即可接入使用。
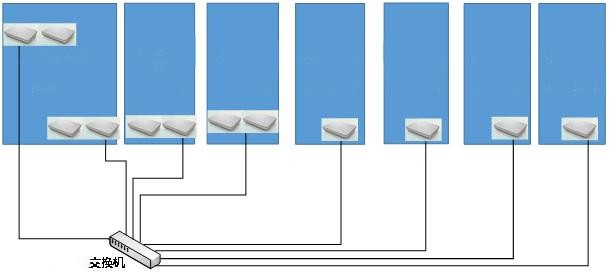
2、网络部署
设备可单机运行,也可以设置为通过网络集中控制统一开关,所有设备均连入局域网,汇入网管与设备控制平台进行统一管理;
设备按计划自动开启和关闭,实现无人值守;
设备状态指示与告警,实现屏蔽失效等的预警; 网络链路示例如下: